�������ƣ���ɳ�h���Զ����豸����˾
��ϵ�ˣ�Ҧ������������
��ϵ�ֻ���
�̶��绰��
��ҵ���䣺3464463681@qq.com
��ϵ��ַ������ʡ��ɳ����´���춥�ֵ�������������468��
�ʱࣺ416808
��ϵ��ʱ����˵���ڵط��������Ͽ����ģ�лл��
-
�ĵ�
-
�漰��Ʒ
-
�ĵ�
-
�漰��Ʒ
-
�ĵ�
-
�漰��Ʒ

SINAMICS V20 1AC200-240V-15/+10% 47-63Hz ��ƹ��� 0,12kW mit 150% ���� ���� 60sec integrierter �˲��� C1 I/O-Interface:4DI,2DO, 2AI,1AO �ֳ�����:USS/MODBUS RTU mit eingebautem BOP ������ʽ IP20/UL Open ��ʽ �ߴ�:FSAA 68x142x108(WxHxD)
|
����ѡ��ѡ����뵽�˲�Ʒ��
����ͬʱ����

SINAMICS V20 1AC200-240V-15/+10% 47-63Hz ��ƹ��� 0,55kW mit 150% ���� ���� 60sec δ���� I/O-Interface:4DI,2DO, 2AI,1AO �ֳ�����:USS/MODBUS RTU mit eingebautem BOP ������ʽ IP20/UL Open ��ʽ �ߴ�:FSAB 68x142x128(WxHxD)

SINAMICS V20 3AC380-480V-15/+10% 47-63Hz ��ƹ��� 0.75kW mit 150% ���� ���� 60sec δ���� I/O-Interface:4DI,2DO, 2AI,1AO �ֳ�����:USS/MODBUS RTU mit eingebautem BOP ������ʽ IP20/UL Open ��ʽ �ߴ�:FSA 90x 150x 146(��x��x��)

SINAMICS V20 3AC380-480V-15/+10% 47-63Hz ��ƹ��� 5.5kW mit 150% ���� ���� 60sec integrierter �˲��� C3 I/O-Interface:4DI,2DO 2AI,1AO �ֳ�����:USS/MODBUS RTU mit eingebautem BOP ������ʽ IP20/UL Open ��ʽ �ߴ�: FSC 184x
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

1.Ӳ������
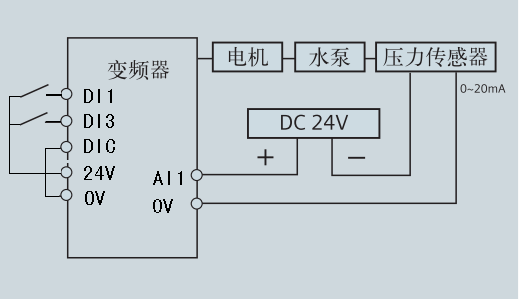
�����ӻ����ͱ�Ƶ�� SINAMICS V20 ��Ӧ���ں�ѹ��ˮϵͳ�������ṩ����Ľ����������̡�
ͨ��BOP���ù̶���ѹ��Ŀ��ֵ��ʹ�� 4~20mA�ܵ�ѹ�������DZ����ɵ�PID���ƺ�ѹ��ˮϵͳ�Ľ�������ͼ��ʾ��

ͼ1-1.V20��Ƶ�����ں�ѹ��ˮ���ͽ���
2���Բ���
2.1 ������λ
�����Ա�Ƶ��ʱ������ִ�й�����λ������
P0010 = 30
P0970 = 1
(��ʾ50? ʱ ����OK��ťѡ������Ƶ�ʣ�ֱ��ת��P304������ٵ��ԡ�)
2.2 ���ٵ���
��2-1 ���ٵ��Բ�����������
| ���� | ���� | ���� |
| P0003 | ���ʼ��� | =3 ��ר�Ҽ��� |
| P0010 | ���Բ��� | = 1 �����ٵ��ԣ� |
| P0100 | 50 / 60 Hz Ƶ��ѡ�� |
������Ҫ���ò���ֵ�� =0: ŷ�� [kW] �� 50 Hz ������ȱʡֵ�� =1: ���� [hp] �� 60 Hz |
| P0304[0] | ������ѹ [V] |
��Χ�� 10 ... 2000 ˵����������������ݱ����������� ������ / �����Σ�һ�� |
| P0305[0] | �������� [A] |
��Χ�� 0.01 ... 10000 ˵���� ������������ݱ����������� ������ / �����Σ�һ�� |
| P0307[0] | �������� [kW / hp] |
��Χ�� 0.01 ... 2000.0 ˵���� �� P0100 = 0 �� 2 ��������� ��λΪ [kW] �� P0100 = 1 ��������ʵ�λΪ [hp] |
| P0308[0] | �������������� cos�� �� |
��Χ�� 0.000 ... 1.000 ˵���� �˲������� P0100 = 0 �� 2 ʱ�ɼ� |
| P0309[0] | ������ [%] |
��Χ�� 0.0 ... 99.9 ˵���� ���� P0100 = 1 ʱ�ɼ� �˲�����Ϊ 0 ʱ�ڲ�������ֵ�� |
| P0310[0] | ����Ƶ�� [Hz] | ��Χ�� 12.00 ... 599.00 |
| P0311[0] | ����ת�� [RPM] | ��Χ�� 0 ... 40000 |
| P0314[0] | ��������� | ����Ϊ0ʱ�ڲ�������ֵ�� |
| P0320[0] | ����Ż�����[%] |
��������ڵ��������ĴŻ������� ����Ϊ0ʱ�ڲ�������ֵ�� |
| P0335[0] | �����ȴ |
����ʵ�ʵ����ȴ��ʽ���ò���ֵ = 0: ���䣨����ȱʡֵ�� = 1: ǿ����ȴ = 2: ���������÷��� = 3: ǿ����ȴ�����÷��� |
| P0507 | Ӧ�ú� | =10: ��ͨˮ��Ӧ�� |
| P0625 | ��������¶� | ��Χ�� -40... 80�棨��������20�� |
| P0640[0] | �������ϵ�� [%] |
��Χ�� 10.0 ... 400.0 ������ȱʡֵ�� 150.0 �� ˵���� �ò�������� P0305 �������� �������������ص�������ֵ������ ��������ȱʡֵ�� |
| P0700 | ѡ������Դ | = 2: �������� |
| P0717 | ���Ӻ� | =8: PID ������ģ�����ο���� |
| P0727 | 2/3�߿��Ʒ�ʽѡ�� | =0: �����ӱ����ƣ����� / ���� |
| P1000[0] | Ƶ���趨ֵѡ�� | =0: �����趨ֵ |
| P1080[0] | ��СƵ�� [Hz] |
��Χ�� 0.00 �� 599.00 ������ȱʡֵ�� 0.00 �� ˵���� �˲��������趨��ֵ����ת�ͷ�ת ����Ч�� ���������Ϊ30Hz�� |
| P1082[0] | ���Ƶ�� [Hz] |
��Χ�� 0.00 �� 599.00 ������ȱʡ ֵ�� 50.00 �� ˵���� �˲��������趨��ֵ����ת�ͷ�ת ����Ч�� |
| P1120[0] | б������ʱ�� [s] |
��Χ�� 0.00 �� 650.00 ������ȱʡ ֵ�� 10.00 �� ˵���� �˲��������趨��ֵ��ʾ�ڲ�ʹ�� Բ������ʱʹ�����ͣ��״̬���� ��������Ƶ�ʣ� P1082 ������� ʱ�䡣 |
| P1121[0] | б���½�ʱ�� [s] |
��Χ�� 0.00 �� 650.00 ������ȱʡ ֵ�� 10.00 �� ˵���� �˲��������趨��ֵ��ʾ�ڲ�ʹ�� Բ������ʱʹ����ӵ�����Ƶ�� �� P1082 ��������ͣ��״̬����� ʱ�䡣 |
| P1135[0] | OFF3 б���½�ʱ�� | ��Χ�� 0.00 �� 650.00 ������ȱʡֵ�� 5.00 �� |
| P1300[0] | ���Ʒ�ʽ |
= 0: �����������Ե� V/f ���ƣ�DZˮ�����ã� = 2: ����ƽ�����Ե� V/f ���� ������ѭ���� ���ã� |
| P1900 | ���ʶ�� | = 0 : ��ʱ���������ʶ |
| P3900 | ���ٵ��Խ��� |
= 3: ���Ե�����ݽ������ٵ��� ˵���� �ڼ������֮�� P3900 �� P0010 �Զ���λ����ʼֵ0 �� ��Ƶ����ʾ ��8.8.8.8.8�� ����������ִ�� �ڲ����ݴ����� |
| P1900 | ѡ��������ʶ�� | = 2: ��ֹʱʶ�����в��� |
|
��ʱ��Ƶ����Ļ�������DZ������š�������A541�� ��ʱͨ������������Ƶ������ʼ�������ʶ�𣬴�����������ʧ�� ���ʶ����ɡ� |
||
2.3 �������������ز�������
2.3.1 DI��������
P0700[0]��2 ��������
P0701[0]��1 DI1 ��Ϊ�����ź�
P0703[0]��9 DI3��Ϊ���ϸ�λ
2.3.2 DO��������
P0731[0]��52.2 DO1����Ϊ�����ź�
P0732[0]��52.3 DO2����Ϊ�����ź�
P0748.1��1 DO2��Ϊ����������й���ʱNO����պϣ�
����ʱNO����Ͽ���
2.3.3 AI��������
P0756[0] ��2 ģ��������ͨ��1�������ź�
P0757[0] ��4 ģ��������ͨ��1����X1=4mA
P0758[0] ��0 ģ��������ͨ��1����Y1=0%
P0759[0] ��20 ģ��������ͨ��1����X2=20mA
P0760[0] ��100 ģ��������ͨ��1����Y2=100%
P0761[0] ��4 ģ��������ͨ��1��������4mA
2.3.4 AO��������
P0771[0]��21 ģ�������ͨ��1������Ϊʵ��Ƶ�����
P0773[0]��50 ģ�������ͨ��1���˲�ʱ��50ms
P0777[0]��0 ģ�������ͨ�� ����X1=0%
P0778[0]��4 ģ�������ͨ�� ����Y1=4mA
P0779[0]��100 ģ�������ͨ�� ����X2=100%
P0780[0]��20 ģ�������ͨ�� ����Y2=20mA
P0781[0]��4 ģ�������ͨ����������4mA
2.4 PID��ѹ���ƹ��ܵ���
P2200[0]��1 ʹ��PID������
P2240[0]��X ���û���������ѹ���趨ֵ�İٷֱ�
P2253[0]��2250 BOP��ΪPIDĿ�����Դ
P2264[0]��755.0 PID����Դ��ģ��ͨ��1
P2265��1 PID�����˲�ʱ�䳣��
P2274��0 ��ʱ�����á�ͨ������Ҫ�رգ�����Ϊ0
P2280��P���� �����������ã���Ҫ�����ֳ����ԣ�
P2285��I���� ����ʱ�����ã���Ҫ�����ֳ����ԣ�
2.5 ������ѡ����
2.5.1 б������������ͣ�� ����
P0701[0]��99 ����DI1ʹ��BICO���ӹ���
P0840[0]��722.0 ����DI1������������
P0852[0]��722.0 ����DI1����Ϊ����ʹ��
2.5.2 ʹ��2����ѹ�������DZ��Ľ���
ͼ2-1 ѹ������ʹ��2�����DZ��Ľ���
2.5.3 ���߹���
V20��Ƶ�����м����߹��ܣ�������Ƶ�ʵ�����ֵʱ���ͣת��������Ƶ�ʸ�����ֵʱ���������
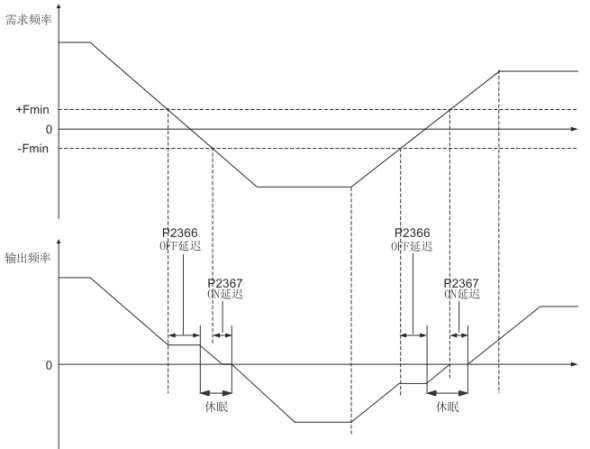
ͼ2-2 ������ģʽ��Ҫ�����Ӧ
P2365[0]��1 ����ʹ�� / ��ֹ �˲���ʹ�ܻ��ֹ���߹��ܡ�
P2366[0]��t1 ���ֹͣǰ���ӳ� [s] ������ʹ�ܵ�����£��˲���
�����Ƶ����������ģʽ֮ǰ���ӳ�ʱ�䡣
��Χ�� 0 ... 254 ������ȱʡֵ�� 5 ��
P2367[0]��t2 �������ǰ���ӳ� [s] ������ʹ�ܵ�����£��˲��������Ƶ��
�˳�����ģʽ֮ǰ���ӳ�ʱ�䡣
��Χ�� 0 ... 254 ������ȱʡֵ�� 2 ��
2.5.4����������
ˮ������ǰ���ܴ���������ת״̬��Ϊ��������ʱ���ֹ������������ò��������ܣ�
P1200��1 ʼ�ռ������ ˫������Ч��
P1202[0]��50 �Ե�������P305��ʾ������������С��
P1203[0]��100 ���600ms������ʱ��
2.5.5 BOP����Ŀ��ֵ����
P2231[0]��1 �趨ֵ�洢����
3�������Ϻͱ���
��3-1 �������ϼ�����
| ���ϴ��� | ���Ϸ��� | ��ϼ����� |
|
F1 ������ |
? ������ʣ� P0307 ���� ��Ƶ�����ʣ� r0206 �� ��һ�� ? ������߶�· ? �ӵع��� r0949 = 0 �� Ӳ������ r0949 = 1 �� �������� |
������и�� ? ������ʣ� P0307 ���������Ƶ�����ʣ� r0206 ��һ�� ? ���³��Ȳ��ó��������ļ���ֵ ? ������º͵���ڲ������ж�·�� �ӵع��� ? �������������ʵ��ʹ�õĵ������ ? ���ӵ���ֵ�� P0350 ��������ȷ�� ? ������ó��ֶ�ת��������� ? ����б������ʱ�䣨 P1120 �� ? ��С��������ǿ�ȣ� P1312 �� |
|
F2 ����ѹ |
? ��Դ��ѹ���� ? �����������ģʽ r0949 = 0 �� Ӳ������ r0949 = 1 �� 2 �� �������� |
������и�� ? ��Դ��ѹ�� P0210 �����������ƹ涨�� ��Χ���� ? б���½�ʱ�䣨 P1121 �������븺�ع��� ��ƥ�� ? ��Ҫ���ƶ����ʱ��봦�ڹ涨��Χ�ڡ� ? Vdc ����������ʹ�ܣ� P1240 ���Ҳ��� ������ȷ
˵���� |
|
F3 Ƿ��ѹ |
? ��Դ���ϡ� ? ������س����˹涨�� ��ֵ r0949 = 0 �� Ӳ������ r0949 = 1 �� 2 �� �������� |
����Դ��ѹ�� |
|
F4 ��Ƶ�� ���� |
? ��Ƶ������ ? ͨ�粻�� ? ����Ƶ�ʹ��� ? �����¶ȹ��� ? ���Ȳ����� |
������и�� ? ���ػ���ѭ���Ƿ���ߣ� ? ������ʣ� P0307 ������ƥ���Ƶ�� ���ʣ� r0206 ���� ? ����Ƶ�ʱ�����Ϊȱʡֵ ? �����¶��Ƿ���ߣ� ? ��Ƶ������ʱ���ȱ�����ת |
|
F5 ��Ƶ�� I 2 t |
? ��Ƶ�����ء� ? ����ѭ��������ߡ� ? ������ʣ� P0307 ������ ��Ƶ�����ʣ� r0206 �� |
������и�� ? ����ѭ�����봦�ڹ涨��Χ�ڡ� ? ������ʣ� P0307 ������ƥ���Ƶ�� ���ʣ� r0206 ���� |
|
F6 оƬ�¶ȳ����ٽ�ֵ |
������� |
������и�� ? ���ػ��ؽ�Ծ�Ƿ���ߣ� ? �����ƹ��Ȳ����� P0626 - P0628 �� ����������ȷ ? ����¶ȱ�����ֵ�� P0604 ������ƥ�� |
|
F20 ֱ���������� |
�������ֱ��������ֵ�ѳ�����ȫ��ֵ�� ��ͨ������Ϊ��Դ�����һ�ඪʧ����� | ����Դ���� |
|
F41 �������ʶ����� |
�������ʶ����ϡ� ? r0949 = 0 �� ���� ? r0949 = 1 �� ʶ���дﵽ ��������ֵ ? r0949 = 2 �� ʶ����� ���ӵ���С�� 0.1% �� ����100% ? r0949 = 30 �� ��ѹ����ֵ ʱ�ĵ��������� ? r0949 = 40 �� ʶ����� ���� ����һ�£�����һ��ʶ�� ���ϻ����迹 Zb = Vmot,nom / sqrt(3) / Imot,nom �İٷֱ�ֵ |
������и�� ? r0949 = 0 �� ����Ƿ������ӵ���Ƶ���� ? r0949 = 1 - 49 �� P0304 - P0311 �е� ��������Ƿ���ȷ�� ? �����Ҫ�ĵ���������ͣ����Σ� ���������ӣ� |
|
F221 PID ���� �źŵ�����Сֵ |
PID �����źŵ�����СֵP2268 |
? ���� P2268 ��ֵ ? ������������ |
|
F222 PID ���� �źŸ������ֵ |
PID �����źŸ������ֵP2267 |
? ���� P2267 ��ֵ ? ������������ |
��3-1 ��������������
| �������� | �������� | ��ϼ����� |
|
A501 ��������ֵ |
? ����������Ƶ�����ʲ�һ�� ? �������̫�� ? �ӵع��� |
������и�� �μ� F1 |
|
A502 ����ѹ ����ֵ |
�ﵽ����ѹ����ֵ�� ��� ��ֹVdc������( P1240 = 0 ) , ��ñ���������б���½�ʱ���� |
��ñ���������ʾ�������Ƶ������� ѹ |
|
A503 Ƿ��ѹ ����ֵ |
? ��Դ���ϡ� ? ��Դ��ѹ��ֱ��ĸ�ߵ�ѹ�� r0026 �����ڹ涨����ֵ |
����Դ��ѹ |
|
A504 ��Ƶ������ |
�ѳ�����Ƶ��ɢ�����¶ȵı����� ֵ��оƬ���µı�����ֵ����оƬ ����ϵ��¶ȿ������仯ֵ���Ӷ� ��������Ƶ�ʽ��ͺ� / �����Ƶ�� ���ͣ�ȡ���� P0290 �еIJ����� �ã� |
˵���� r0037 = 0 �� ɢ�����¶� r0037 = 1 �� оƬ���£�����ɢ������
������� |
|
A505 ��Ƶ�� I 2 t |
�ѳ���������ֵ������������Ӧ�� ���� P0610 = 1 ��������ή�� |
��鸺��ѭ���Ƿ��ڹ涨����ֵ�� |
|
A506 IGBT �������߱��� |
���ر����� ɢ������ IGBT ���µIJ�ֵ������������ֵ | ��鸺�ؽ�Ծ����������Ƿ��ڹ涨����ֵ�� |
|
A507 ��Ƶ���¶��źŶ�ʧ |
��Ƶ��ɢ�����¶��źŶ�ʧ ; �������������� |
��ϵ���������Ż������Ƶ�� |
|
A511 ������� I 2 t |
? ������ء� ? ����ѭ�����ؽ�Ծ���� |
�����������¶�ȷ����ʽ����Ӧ������и�� ? P0604 ����¶ȱ�����ֵ ? P0625 ��������¶� ? ������������Ƿ���ȷ�� ����ȷ�� ������ �п��ٵ��ԡ� ͨ��ִ�е�� ����ʶ�� �� P1900 = 2 �����ɻ�� ȷ�ĵ�Ч��· ���ݡ� ? ����������� P0344 ���Ƿ� ������ �б� Ҫ�Ļ������������ ? �����������ӱ��������ͨ�� P0626 �� P0627 �� P0628 �ı� �������¶� |
|
A541 ������� ʶ�� |
�������ʶ�� P1900 ����ѡ��� �������� | |
|
A910 Vdc-max ����������ֹ |
��������������³��� ? ��Դ��ѹ�� P0210 ������ ���ߡ� ? ����ɼ�����������Ӷ� ʹ �����������ģʽ�� ? б���½�ʱ���ںܸߵ� ���ع� ���¡� ����ڱ�Ƶ���������������� ֹ��ʱ���ֱ��� A910 �������� �� ON ��������ų� A910 ���� ԭ��֮ǰ���ἤ�� Vdc-max ���� ���� A911 �� |
������и�� ? �����ѹ���ڷ�Χ�� ? ���ر���ƥ�� ? ��ijЩ����£�ʹ���ƶ����� |
|
A911 Vdc-max ������ ���� |
Vdc-max �������������DZ���ֱ�� ĸ�ߵ�ѹ�� r0026 ������ r1242 �� �������ֵ |
������и�� ? ��Դ��ѹ���������ƹ涨�� ��Χ���� ? б���½�ʱ�䣨 P1121 �������� ���ع�����ƥ��
˵���� |
|
A912 Vdc-min ������ ���� |
���ֱ��ĸ�ߵ�ѹ�� r0026 ������ r1246 �ж������ֵ���� Vdc-min �������ᱻ������ �˺���Ķ�����������ֱ��ĸ �ߵ�ѹ���Ӷ�ʹ��Ƶ�����١� �� �˶�·���ϲ�һ��������Ƿ��ѹ�� բ�� ��ע��ñ��������ڿ���б������ ʱ���� |
|
|
A922 ��Ƶ������ |
��Ƶ�����ء� ��ˣ��ڳ��渺�������£� ijЩ���ܿ�����ʵ�� |
������Ƿ�������Ƶ�� |
�ؼ���
S7-200��V20֮���USSͨѶ
S7-200��V20��USSͨѶ
1�������̵�ϵͳ���ã�
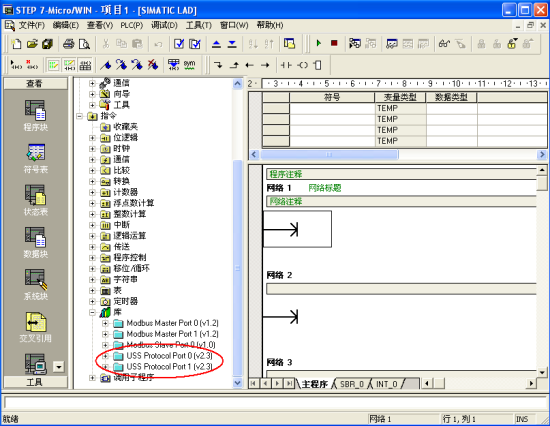
��1����װStep7 Micro/Win V4.0 SP6������USSЭ��V2.3���������ص�ַ��
�����ӱ���ָ�
http://www.ad.siemens.com.cn/download/searchResultbx?searchText=S0010
Micro/WIN V4.0 SP���������ص�ַ��
http://www.ad.siemens.com.cn/download/searchResultbx?searchText=S0002
��2��PC/PPI���¡�S7-200����Դģ�顢ͨ�ŵ��¡�
��3��V20����װ�ú�һ̨PC����
2����ʹ��MicroWin software ������Ŀ֮ǰ��ȷ��USS���ļ��Ѿ���װ��
3������һ�����̣�
3.1 ����ͨѶ�ӿ�
������ʹ��PC/PPI���¡�

3.2 ����PC��PLC֮�������
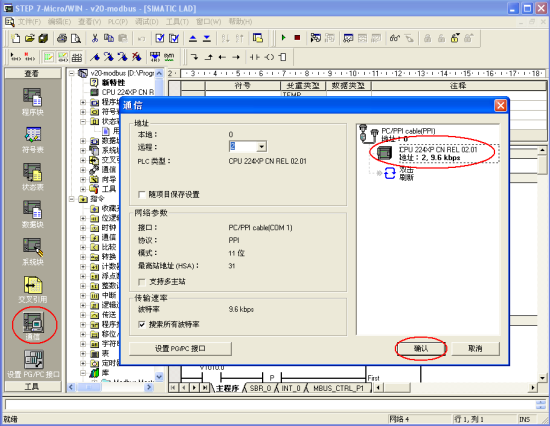
��˫��ˢ�¡�������PLC�����ȷ�ϡ���
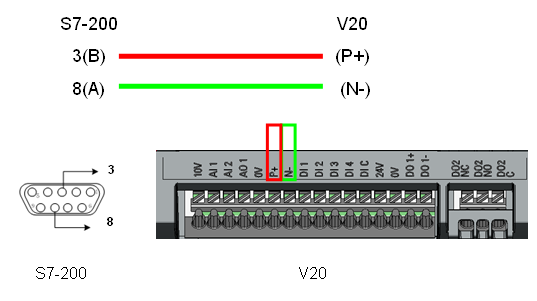
3.3 �õ��½�S7-200 Port 0�˿���V20��RS485�ӿ�������ע��˿����ӹ���V20��
P+��3��N-��8��������ͼ��ʾ��
3.4 ��Ƶ���������ã�
V20 ����ͨ��ѡ�����Ӻ�Cn010ʵ��USS���ƣ�Ҳ����ͨ��ֱ�Ӹ��ı�Ƶ�������ķ�����ʵ�֡������������±���ʾ��
��һ��
| ���� | ���� | Cn010Ĭ��ֵ | ʵ������ | ��ע |
| P0700[0] | ѡ������Դ | 5 | 5 | RS485Ϊ����Դ |
| P1000[0] | ѡ��Ƶ�� | 5 | 5 | RS485Ϊ�ٶ��趨ֵ |
| P2023 | RS485Э��ѡ�� | 1 | 1 | USSЭ�� |
| P2010[0] | USS/MODBUS������ | 8 | 6 | ������Ϊ9600bps |
| P2011[0] | USS��ַ | 1 | 3 | ��Ƶ����USS��ַ |
| P2012[0] | USS PZD���� | 2 | 2 | PZD���ֵ����� |
| P2013[0] | USS PKW���� | 127 | 127 | PKW���������ɱ� |
| P2014[0] | USS/MODBUS���ļ��ʱ�� | 500 | 0 | ��������ʱ�� |
3.5 ʹ��USSЭ��ij�ʼ��ģ���ʼ��S7-200��PORT0�˿ڣ�
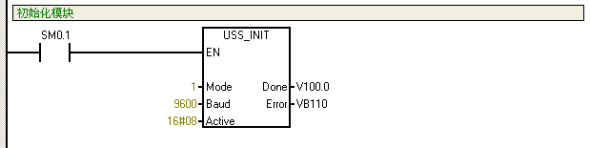
ENʹ�ܣ�ÿ�θı�ͨѶ״̬��Ӧ��ִ��һ�γ�ʼ��ָ�����EN�ź�Ӧ��ͨ�����ؼ��Ԫ�����弤�
Mode�������USS����ֵѡ��ͨѶЭ�顣
1��Ϊ�˿�0ָ��USSЭ�飬�����ø�Э�顣
0��Ϊ�˿�0ָ��PPIЭ�飬����ֹUSSЭ�顣
Baud: �����ʣ�9600��19200��115200��
Active������������ַ��
Done����USS_INIT ָ��ִ����ɺ�Done=1��
Error��ָ��ִ�еĽ��������д�����ʾ������롣
Active������������ַ������

3.6 ʹ��USS����CTRLģ��������USS��ַΪ3�ı�Ƶ����Ϊ�����б�Ƶ����Ҫ���ձ�һ���ò�����

״̬����

���ܿ鶨�壺
EN��ͨ��������Ǽ��
RUN��ָʾ����Ϊ����(1)�����ֹ(0)��
OFF2������V20����ͣ����
OFF3������V20����ֹͣ��
F _ACK��V20���ϸ�λ��
DIR��V20ת������(0����ʱ�룻1��˳ʱ��)��
Drive��V20��ַ 0-31��
Speed���ٶȸ���ֵ����ȫ�ٵİٷֱȸ��� (-200.0~~200.0%����ֵʱ��V20����)��
Resp_R����ѯV20��ɨ��ʱ=1������������ֵ��
Error�������ֽڣ��μ�����USSָ��ִ�д���
Status��V20����״ֵ̬��
Speed��V20�ٶȣ�(-200.0~~200.0%)��
Run_EN��V20����״̬(1�����У�0��ֹͣ)��
D_DIR��V20ת������(0����ʱ�룻1��˳ʱ��)
Inhibit��V20��ֹλ״̬�� (0�����ã�1����ֹ)��Ҫ�����ֹλ�����뽫Fault���㣬
RUN��OFF2�� OFF3����ҲҪ���㡣
Fault��ָʾ����״̬������V20���ϱ�ȷ�Ϲ��ϡ������ų�����λF _ACKʹFault
���㡣
������Error ��Ϣ
| Error���� | ˵�� |
| 0 | û�д��� |
| 1 | ����δ��Ӧ |
| 2 | ��������Ӧ�д���У��ʹ��� |
| 3 | ��������Ӧ�д�����żУ����� |
| 4 | �����û�������ŵ��³��� |
| 5 | ����ִ������Ч���� |
| 6 | �ṩ��������ַ��Ч |
| 7 | ��ͨѶ�ӿڲ���ʵ��USSЭ�� |
| 8 | ��ͨѶ�ӿ�����æ�ڴ���ָ�� |
| 9 | �����ٶ�������� |
| 10 | ������Ӧ�ij��Ȳ���ȷ |
| 11 | ������Ӧ�����ַ�����ȷ |
| 12 | ������Ӧ�ij����ַ�����ȷ |
| 13 | ������Ӧ���� |
| 14 | ������DB_PTR��ַ����ȷ |
| 15 | �����IJ����Ų���ȷ |
| 16 | ѡ������Ч��Э�� |
| 17 | ����USS������������ |
| 18 | ָ������Ч�IJ����� |
| 19 | ��ͨѶ������δ���� |
| 20 | ������Ӧ�еIJ�����ֵ����ȷ |
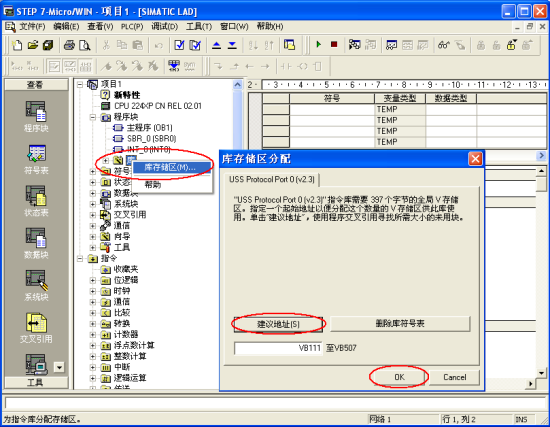
3.7 ��洢�����䣺�ڱ������֮ǰ��ѡ�� ������顱 ->�� �⡱ �Ҽ���ѡ��洢�������ڵ�� �������ַ�� ѡ��V�洢���ĵ�ַ���� ��OK���˳���
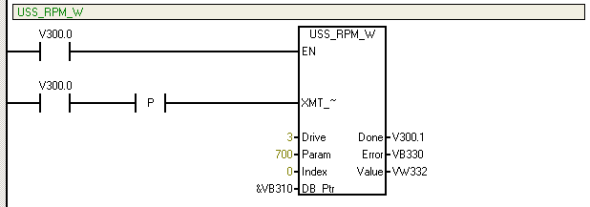
3.8 ��дU16���Ͳ�����
3.81������ʹ��USS_RPM_W��ȡ����P0700��ֵ��
״̬����

ע�⣺
��1��������P0700������������ΪU16����������
��2��ֻҪ��V300.0һ�������أ������һ��P0700�����Ķ�������
��3������IJ���������VW332�
��4����Ҫע�����IndexΪ0ʱ������Pxxx.0������
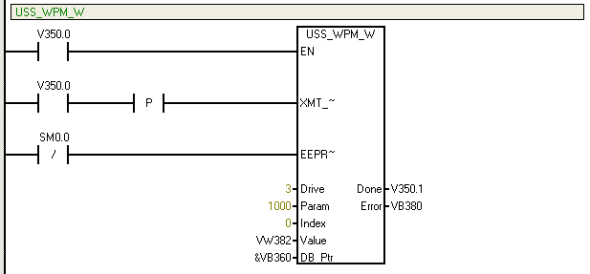
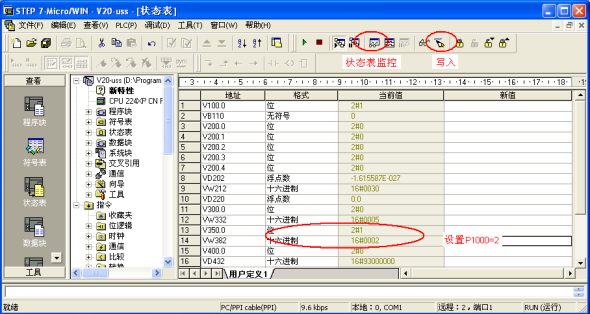
3.8.2 ������ʹ��USS_RPM_W���ò���P1000��
״̬����
ע�⣺
��1��д����P1000������������ΪU16����������
��2��ֻҪ��V350.0һ�������أ������һ��P1000������д������
��3��EEPR~����Ϊ0ʱ��д���ֵֻ���浽RAM�У�Ϊ1ʱ��д���ֵ���浽EEPROM��
��4��EEPROM��д�������д������Ƶģ�V20������50000�Ρ�
3.9 ��дU32���Ͳ�����
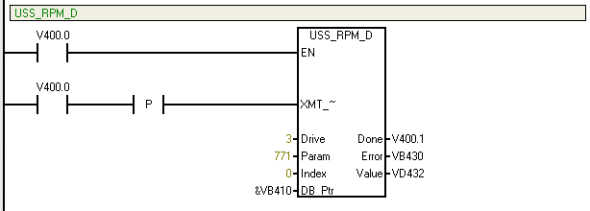
3.9.1������ʹ��USS_RPM_D��ȡ����P0771.In000��ֵ��
״̬����
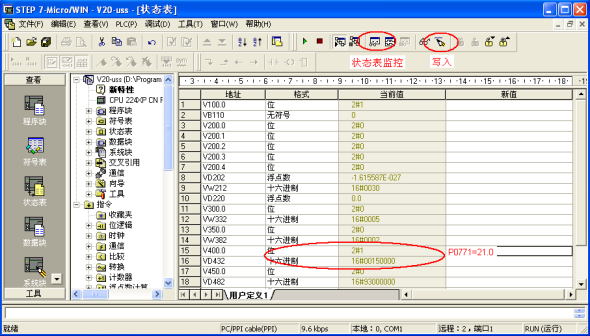
ע�⣺
��1��������P771������������ΪU32����������
��2��ֻҪ��V400.0һ�������أ������һ��P771�����Ķ�������
��3������IJ���������VD432�16#00150000=21.0��
��4����Ҫע�����IndexΪ0ʱ������Pxxx.0�����顣
3.9.2 ������ʹ��USS_WPM_D���ò���P0771.In000
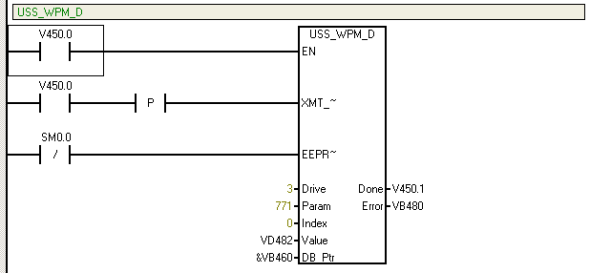
״̬����

ע�⣺
��1��д����P771������������ΪU32����������
��2��ֻҪ��V450.0һ�������أ������һ��P771������д������
��3��EEPR~����Ϊ0ʱ��д���ֵֻ���浽RAM�У�Ϊ1ʱ��д���ֵ���浽EEPROM��
��4��EEPROM��д�������д������Ƶģ�V20������50000�Ρ�
3.10��дFloat���Ͳ�����
3.10.1������ʹ��USS_RPM_R��ȡ����P0305.In001��ֵ��
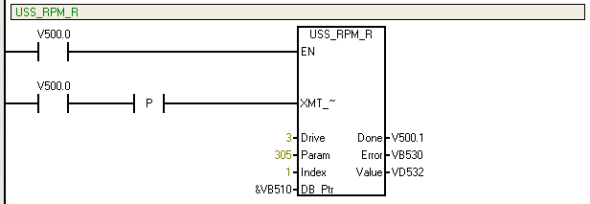
״̬����

ע�⣺
��1��������P0305.In001��������������������
��2��ֻҪ��V550.0һ�������أ������һ��P0305.In001�����Ķ�������
��3������IJ���������VD532�
��4����Ҫע�����IndexΪ1ʱ������Pxxx.1�����顣
3.10.2������ʹ��USS_WPM_R���ò���P0305.In001=1.5A
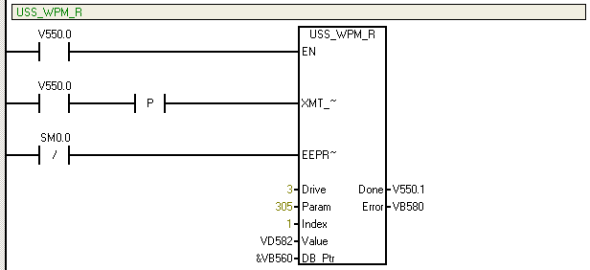
״̬����
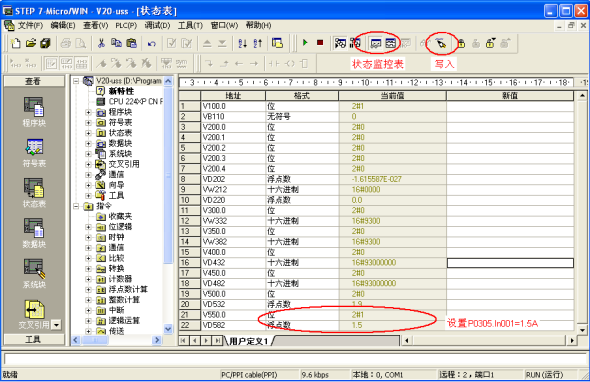
ע�⣺
��1��д����P0305.In001������������Ϊ��������P0305����������P0010=1���ٵ��ԡ�
��2��ֻҪ��V550.0һ�������أ������һ�β���P0305.In001��д������
��3��EEPR~����Ϊ0ʱ��д���ֵֻ���浽RAM�У�Ϊ1ʱ��д���ֵ���浽EEPROM��
��4��EEPROM��д�������д������Ƶģ�V20������50000�Ρ�
�ؼ���
V20��USS
SMART LINEϵ�д�����ͨ��MODBUSЭ��ֱ����V20��Ƶ��ͨѶ
1. ����
ͨ������£�Ҫʵ��HMI�豸��V20��Ƶ����ͨѶ����Ҫһ��֧��USSͨѶ��MODBUSͨѶ��PLC������S7-200ϵ��PLC����ͨѶ����������ͼ1��ʾ��PLC��һ��ͨѶ�˿��봥�������ӣ����Բ���PPIЭ��ͨѶ��PLC����һ��ͨѶ�˿���V20��RS485ͨѶ�˿����ӣ�����MODBUSЭ��ͨѶ��PLC�ϱ�дMODBUS��վ����V20Ϊ��վ��

ͼ1 ������ͨ��PLC��V20��Ƶ��ͨѶ
���ֻ��Ҫ��V2O��Ƶ���������п��ƺͱ������ӣ���ô����������PLC�����ý�Ϊ������ת����������£�������ֱ�Ӻ�V20��Ƶ��ͨѶ�������ܹ�ʵ�ּ�ع��ܣ����ҿ�������һ��PLC����ʡ�ɱ������������ӵ�SMART LINEϵ�д������ܹ�ʵ����V20��Ƶ��ֱ��ͨѶ�Ĺ��ܡ�ͨѶ����������ͼ2��ʾ��SMART LINE��������ΪMODBUS��վ��V20Ϊ��վ��

ͼ2 ������ֱ����V20��Ƶ��ͨѶ
2. Ӳ���豸���䰲װ
������һ��ʵ��������Smart Line��������һ̨V20��Ƶ��ͨ��MODBUSͨѶ��ʵ�ַ��������������õ�����ҪӲ���豸���1��ʾ����������̬����ΪWinCC Flexible 2008 SP4 China��
��1 ʾ����ҪӲ���豸
| ���� | ������ | ���� | ˵�� |
| ������ | 6AV6648-0BE11-3AX0 | 1 | Smart 1000 IE |
| 24V��Դ | 6EP1332-1SH51 | 1 | DC24V/4A |
| ��Ƶ�� | 6SL3210-5BE17-5UV0 | 1 | V20 ��Ƶ�� 0.75kW |
| ��� | 1LA9060-4KA10-Z | 1 | 1LA9 ��� 0.12kW |
Ӳ����װ�������£�
1������Ƶ����������������̶��ڰ�װ��λ�ϡ�
2�����ӱ�Ƶ��������Ķ������ºͽӵص��¡�
3�����ӹ����Դ����Ƶ���Ķ������ºͽӵص��¡�
4�����ӱ�Ƶ���ʹ�������RS485ͨѶ���¡�������RS485��9��ӿ��� V20���Ӷ�Ӧ��ϵ��3��ӦP+��8��ӦN-��
5������24Vֱ����Դ�Ľ������ߵ��º͵���������ֱ��������¡�
3. V20��Ƶ����������
V20��Ƶ��Ҫ����MODBUSͨѶ���������������ã�
1����Ƶ���ָ�����������
P0010=30
P0970=21
2����Ƶ�����ٵ��ԣ�ѡ��Cn011-MODBUSͨѶ���Ӻ꣺
a)���õ���Ƶ�ʺ��ʵ�λ
b)���������Ʋ���
c)ѡ�����Ӻ�Cn011-MODBUSͨѶ
d)ѡ��Ӧ�ú�AP000
Cn011���Ӻ��Ӧ�������2��ʾ��
��2 Cn011��Ӧ��������
| ���� | ���� | ����ȱʡֵ | Cn011Ĭ��ֵ | ��ע |
| P0700[0] | ѡ������Դ | 1 | 5 | RS485Ϊ����Դ |
| P1000[0] | ѡ���ٶȸ��� | 1 | 5 | RS485Ϊ�ٶ��趨ֵ |
| P2023[0] | RS485Э��ѡ�� | 1 | 2 | MODBUS RTUЭ�� |
| P2010[0] | USS/MODBUS������ | 8 | 6 | ������Ϊ9600bps |
| P2021[0] | MODBUS��ַ | 1 | 1 | ��Ƶ��MODBUS��ַΪ1 |
| P2022[0] | MODBUSӦ��ʱʱ�� | 1000 | 1000 | ����վ����Ӧ������ʱ�� |
| P2014[0] | USS/MODBUS���ļ��ʱ�� | 2000 | 100 | ��ر��ļ��ʱ�� |
3����MODBUSͨѶ��������������ΪCn011���Ӻ�Ĭ�ϲ�����
P2014[0]=0 ����ر��ļ��ʱ�䣬������ܻᱨF72����
P2021[0]=3 MODBUS�豸��ַΪ3���봥������̬���������õĴ�վ��ַһ�£�
4. ��������̬
��WinCC Flexible 2008 SP4 China��������̬Smart 1000 IE����������ϸ�������£�
1��������Ŀ��
����һ������Ŀ����ͼ3��ʾ��

ͼ3 ��������Ŀ
ѡ�������豸ΪSmart 1000 IE����ͼ4��ʾ��

ͼ4 ѡ��Smart 1000 IE������
2���������ӡ�
�����ӻ������½�һ�����ӣ���ز����������£�
ͨѶ��������Modicon MODBUS
���ͣ�RS485
�����ʣ�9600
��żУ�飺ż
�����8
ֹͣλ��1
��֡��RTU Standard
CPU���ͣ�984
��վ��ַ��3
����������ͼ5��ʾ��

ͼ5 ��������
3�����ӱ�����
�������Ƶ�������ص�10�����������3��ʾ��
��3 �����б�
| ������ | MODBUS�Ĵ�����ַ | ˵�� |
| CtrlWord1 | 40100 | ������1 |
| SetPoint | 40101 | �ٶ��趨ֵ |
| StsWord1 | 40110 | ״̬��1 |
| Feedback | 40111 | �ٶ�ʵ��ֵ |
| ActFreq | 40342 | Ƶ��ʵ��ֵ |
| OutpVoltage | 40343 | �����ѹ |
| DCVol | 40344 | ֱ����ѹ |
| OutpCurrent | 40345 | ������� |
| OutpTorque | 40346 | ���ת�� |
| OutpPower | 40347 | ������� |
������ַ����V20��Ƶ�������ֲᣬ������ɺ�ı���������ͼ6��ʾ��

ͼ6 ���ӱ���
�ٶ��趨ֵ����SetPoint����-16384(-4000H)��+16384(+4000H)����ʾ-50Hz��+50Hz��ת�٣��˴����ñ���������ת�����ԣ���-16384��Ӧ-1500��+16384��Ӧ+1500����ͼ7��ʾ���ٲ��ñ���������ֵ���ԣ�������������ֵ������-1600��+1600֮�䣬�������������ֵ�ķ�Χ�������벻�����á���ͼ8��ʾ��
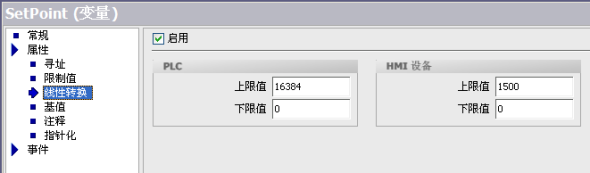
ͼ7 �ٶ��趨ֵ��������ת��

ͼ8 �ٶ��趨ֵ��������ֵ
�ٶȷ���ֵ����FeedbackҲ����-16384(-4000H)��+16384(+4000H)����ʾ-50Hz��+50Hz��ת�٣��˴�Ҳ���ñ���������ת�����ԣ���-16384��Ӧ-1500��+16384��Ӧ+1500����ͼ9��ʾ��ע�⣬ͼ9��ͼ7��ʾ������ת����һ�µġ�

ͼ9 �ٶȷ���ֵ��������ת��
4�����ӻ��档
��Ŀ����ʱ�Ѿ���һ��ģ���һ�����棬�������õ�һ�����档�Ļ��������ΪV20_Monitor����ͼ10��ʾ��

ͼ10 �༭֮ǰ�Ļ���V20_Monitor
5���༭ģ�塣
ģ���еĶ�����ѡ��ʹ��ģ��Ļ����л���ʾ�������˴��������ӵ�LOGO���˳�Runtime�İ�ť������ģ���У���ͼ11��ʾ��

ͼ11 �༭ģ��
Ȼ���ڰ�ť���¼����������Ӻ������ڰ�ťSTOP RT�¼����Եĵ����¼�������StopRuntime��������ͼ12��ʾ��

ͼ12 �˳����л��水ť�¼�����
6���༭���档
��V20_Monitor�����з���IO���ı���ť����ͼ��Բ�εȶ������ı�����������Ӧ���ı��������ֺš���ɫ�ȣ�����ض�������������룬��ɺ��V20_Monitor������ͼ13��ʾ��

ͼ13�༭��ɵĻ���V20_Monitor
��10��IO��ֱ�����10��������
���п�����1��״̬��1����16������ʾ��������1����ģʽΪ����/�����״̬��1����ģʽΪ�������ͼ14��ʾ��

ͼ14 ������1��ӦIO������
ת���趨��ʵ��ת�١������ѹ��ֱ����ѹ���ô�����������ʾ��ת���趨����ģʽΪ����/���������������������ģʽΪ�������ͼ15��ʾ��

ͼ15 ʵ��ת�ٶ�ӦIO������
���Ƶ�ʡ�������������ת�ء�������ʲ��ô�����������ʾ�����ƶ�С����2λ������ģʽΪ�������ͼ16��ʾ���˴��ƶ�С����2λ�������ǽ�ͨѶ���յ���ֵ����100����ʾ�ڴ������ϣ���������������V20��Ƶ���ڷ�����Щֵʱ��ʵ��ֵ����100��

ͼ16 ���������ӦIO������
������IO������ʾʵ��ת�ٵ���ֵ�⣬�����ð�ͼ����ͼ�λ�����ʽ����ʾʵ��ת�٣��༭��ɵİ�ͼ�����ͼ17��ʾ��

ͼ17 �༭��ɵİ�ͼ���
���ð�ͼ�ij������ԣ��������ӱ���ΪFeedback�����ֵ��Ϊ2000����Сֵ��Ϊ-2000����ͼ18��ʾ��

ͼ18 ��ͼ������������
���ð�ͼ����ۣ���ͼ19��ʾ��

ͼ19 ��ͼ�����������
���ð�ͼ�̶ȣ���ͼ20��ʾ��

ͼ20 ��ͼ�̶���������
����ָʾ������ָʾ��Ƶ���Ƿ�������״̬�����ӱ���ΪStsWord1�ĵ�2λ������ʱ��ʾ��ɫ��������ʱ��ʾ��ɫ������۶���������ͼ21��ʾ��

ͼ21 ����ָʾ������۶�������
��תָʾ������ָʾ��Ƶ���Ƿ��ڷ�ת״̬�����ӱ���ΪStsWord1�ĵ�14λ����תʱ��ʾ��ɫ���Ƿ�תʱ��ʾ��ɫ������۶���������ͼ22��ʾ��
ͼ22 ��תָʾ������۶�������
����ָʾ������ָʾ��Ƶ���Ƿ��ڹ���״̬�����ӱ���ΪStsWord1�ĵ�3λ������ʱ��ʾ��ɫ���ǹ���ʱ��ʾ��ɫ������۶���������ͼ23��ʾ��

ͼ23 ����ָʾ������۶�������
��������4����ť�Ĺ��ܣ��˴��ڰ�ť�ĵ����¼������Ӳ�ͬ�ĺ�����ʵ�ֲ�ͬ�Ĺ��ܡ�
������ť������SetValue����������ΪCtrlWord1��ֵΪ1150��16����047E����������SetBitInTag������������ΪCtrlWord1��λΪ0����ͼ24��ʾ��ÿ�ΰ���������ť�����������ȷ���047E���ٷ���047F��V20��Ƶ����ʵ���������ܡ�
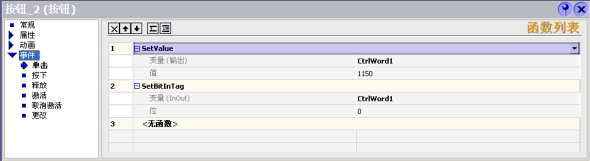
ͼ24 ������ť�¼�����
ֹͣ��ť������ResetBitInTag����������ΪCtrlWord1��λΪ0����ͼ25��ʾ��ÿ�ΰ���ֹͣ��ť��������1�ĵ�0λ������λΪ0��������������047E��V20��Ƶ����ʵ��OFF1ͣ�����ܡ�
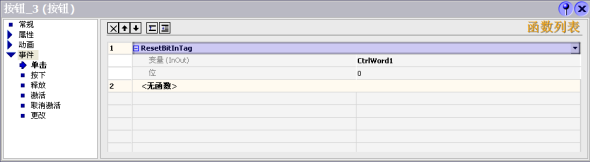
ͼ25 ֹͣ��ť�¼�����
����ť������InvertBitInTag����������ΪCtrlWord1��λΪ11����ͼ26��ʾ��ÿ�ΰ��·���ť��������1�ĵ�11λ���������㣬����������Ӧ����ת��תָ���V20��Ƶ����ʵ��ת�����ܡ�
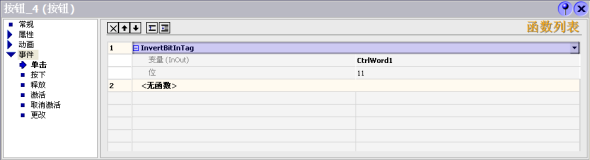
ͼ26 ����ť�¼�����
����ȷ�ϰ�ť������SetBitInTag����������ΪCtrlWord1��λΪ7��������ResetBitInTag������������ΪCtrlWord1��λΪ7����ͼ27��ʾ��ÿ�ΰ��¹���ȷ�ϰ�ť�����������ȷ���1״̬�Ĺ���ȷ��λ���ٷ���0״̬�Ĺ���ȷ��λ��V20��Ƶ����������ȷ��λһ�������أ�ʵ�ֹ���ȷ�Ϲ��ܡ�
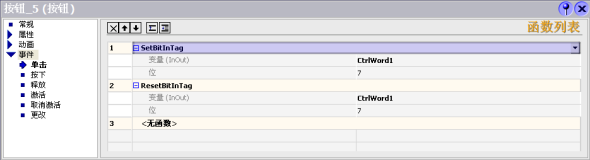
ͼ27 ����ȷ�ϰ�ť�¼�����
5. ϵͳ����Ч��
�����������֮��������̬�������������С�ʵ������Ч��֤����SMART LINE��������V20��Ƶ��ͨѶ����������������ͨ���ĸ���ť���Ʊ�Ƶ�����С�ֹͣ�������Լ�����ȷ�ϣ���Ƶ����ر�����״̬�����ڴ���������ȷ��ʾ����Ƶ������ʱ��������ʾ������ͼ28��ʾ��
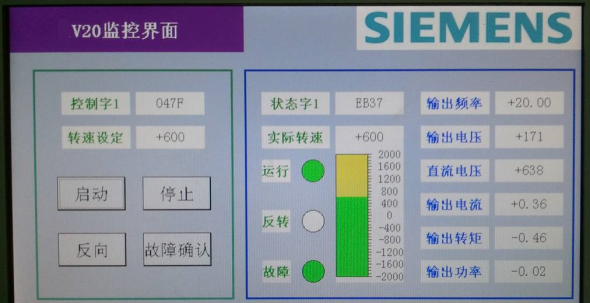
ͼ28 ��Ƶ������ʱ��������ʾ����
�ؼ���
V20��SMART LINE��MODBUSͨѶ